Things get tricky
To avoid cost, either monetary or learning, I used servo motors to move the roof. The idea was that the two roof halves would be mounted onto draw runners to allow smooth sliding motion, with little friction:
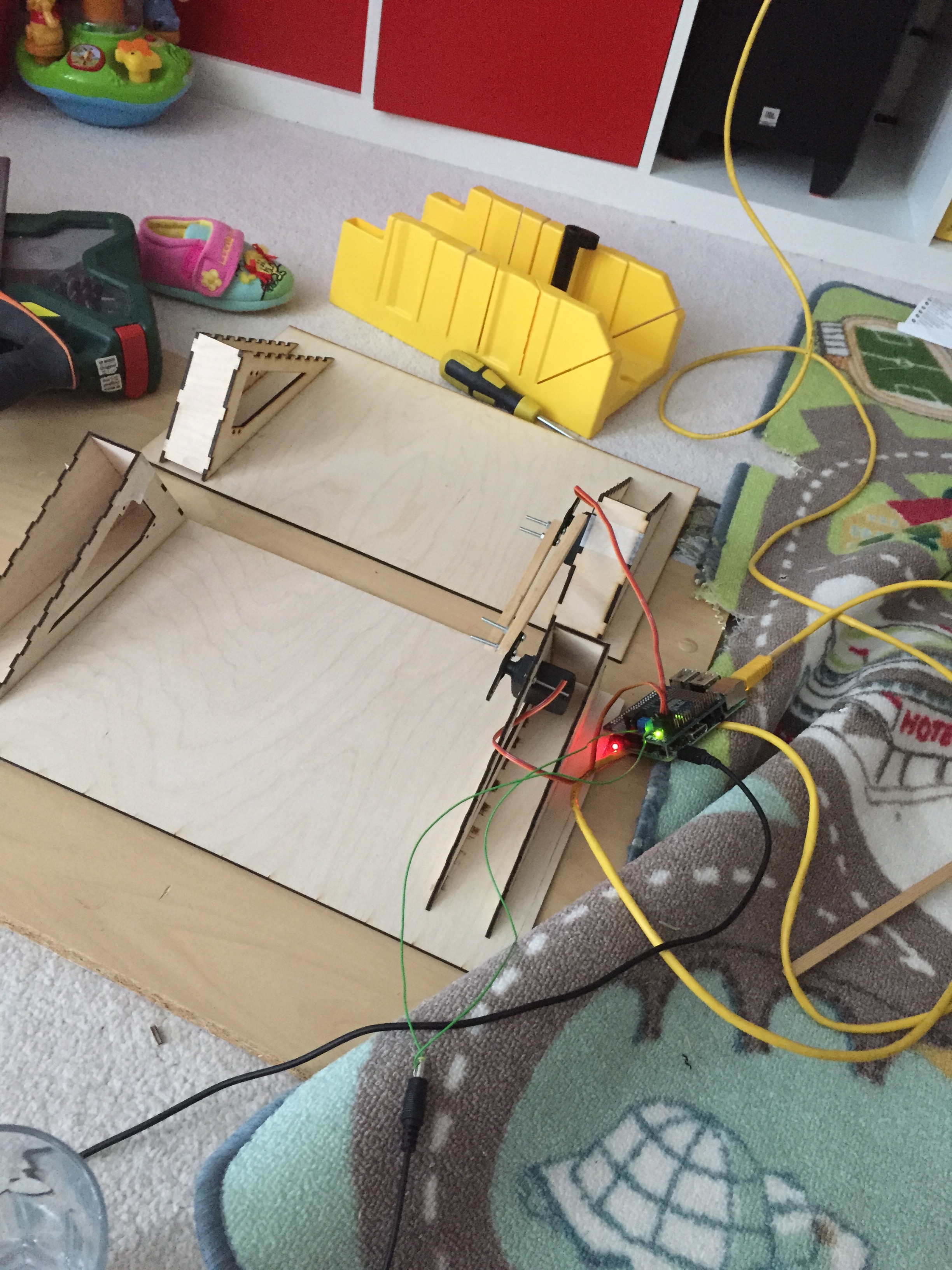
Here are the servos being mounted with arms. They are being controlled by a Pi with a servo hat from adafruit. So far so good. Now its time to mount the roof halves on the draw slider:

The mounting holes were in the wrong place. Hand drilling to make sure everything ends up in the right place.
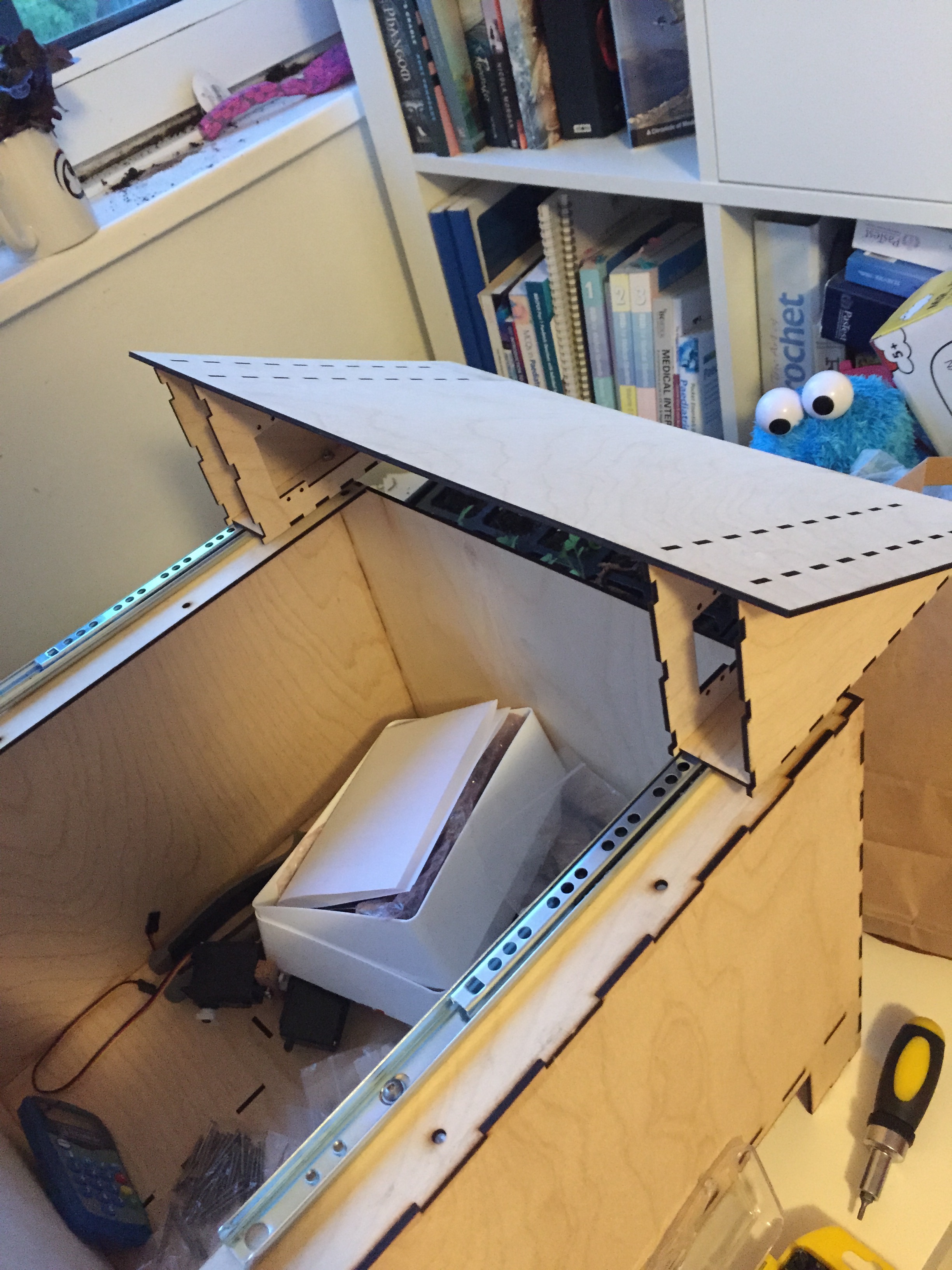
Excellent, it looks like everything finally fits. However there are some sticking points where the motor isn’t strong enough to overcome. sigh looks like the rails aren’t linear. Lets make some after market adjustments:

Pushing the edges out with a set of pliers seemed to do the job. Not the best solution, but it is a solution.
IT WORKS!